Machine Learning for Autonomous Driving
Charles Ruizhongtai Qi
Staff Research Scientist at Waymo
Apr 04, 2022 (Mon), 10:30 a.m. KST | Zoom
Guest Lecture at CS492(A): Machine Learning for 3D Data
Minhyuk Sung, KAIST, Spring 2022
Google Calendar Link Zoom Link
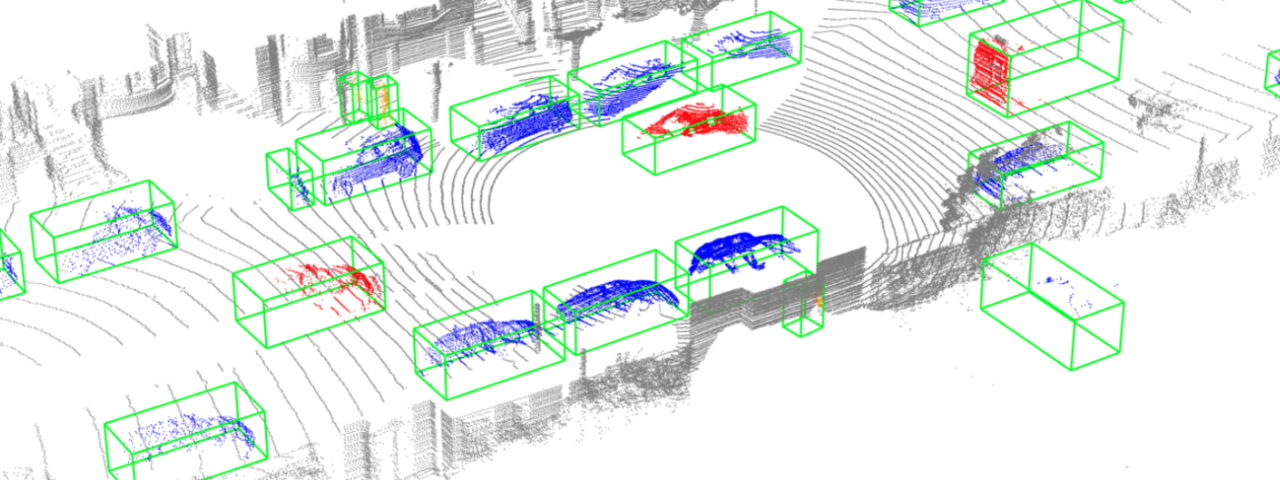
Image credit: http://charlesrqi.com
Abstract
Autonomous driving is one of the most grand challenges of our generation. To achieve scalable and robust autonomy, machine learning plays a key role. In this talk, I will first briefly go over the history of autonomous driving with a focus on how machine learning accelerated its development. Then I will dive deep into several example works on 3D perception (frustum pointnet, range sparse net, offboard 3d object detection) and behavior prediction (multipath). Towards the end of the talk, I will introduce the Waymo Open Dataset as well as point out a few future directions of research in autonomous driving.
Bio
Charles Ruizhongtai Qi joined Waymo in 2019 and is now a Staff Research Scientist and Manager at its Research team. Previously, he was a postdoctoral researcher at Facebook AI Research (FAIR) and received his Ph.D. from Stanford University (Stanford AI Lab and Geometric Computation Group) in 2018 , advised by Professor Leonidas J. Guibas. Prior to Stanford, he received his B.Eng. from Tsinghua University in 2013. His research focuses on deep learning, computer vision, 3D and their applications in autonomy systems. He has developed novel deep learning architectures for 3D data (point clouds, volumetric grids and multi-view images) that have wide applications in 3D object classification, object part segmentation, semantic scene parsing, scene flow estimation and 3D reconstruction; such deep architectures have been well adopted by both academic and industrial groups across the world. More info is on his homepage: http://charlesrqi.com